/*
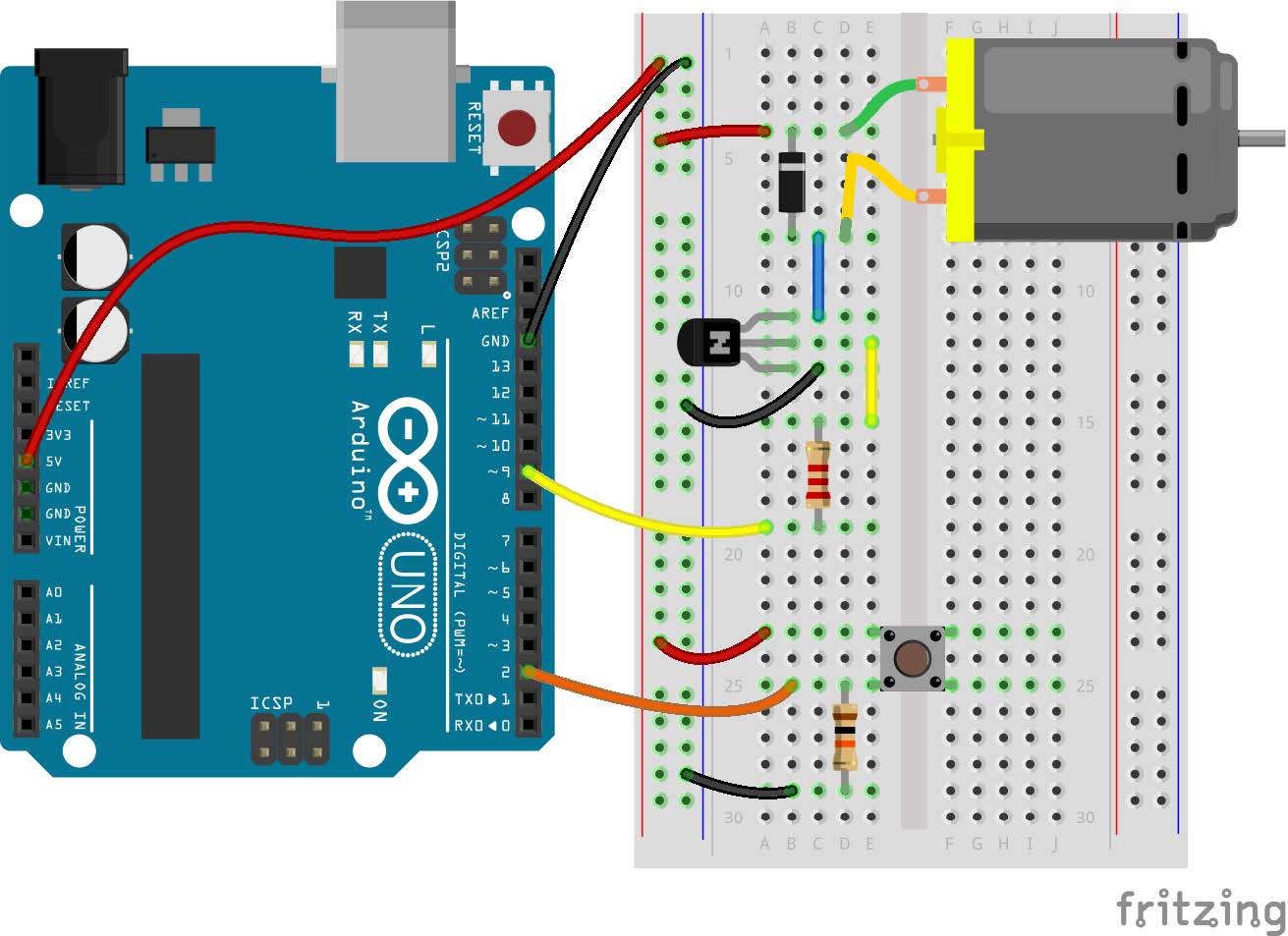
Make the motor spin while the pushbutton is
pressed and stop it when the pushbutton
is released.
*/
// constants won't change. They're used here to
// set pin numbers:
// in Pin 9 we will connect the motor control
// signal. Give it a name.
const int motorPin = 9;
// in Pin 2 we will connect the button control
// signal. Give it a name.
const int buttonPin = 2;
// variables will change:
// variable for reading the pushbutton status
int buttonState = 0;
// the setup routine runs once when you press
// reset:
void setup() {
// initialize the motor pin as an output
pinMode(motorPin, OUTPUT);
// initialize the pushbutton pin as an input
pinMode(buttonPin, INPUT);
}
// the loop routine runs over and over again
// forever:
void loop() {
// read the state of the pushbutton value
buttonState = digitalRead(buttonPin);
// check if the pushbutton is pressed.
// if it is, the buttonState is HIGH.
if (buttonState == HIGH) {
// spin motor
digitalWrite(motorPin, HIGH);
} else {
// stop motor
digitalWrite(motorPin, LOW);
}
}