Χωριστήκαμε σε ομάδες εργασίας και πιάσαμε ξανά δουλειά:
Σταθεροποιήθηκε ο σκελετός του hydrobot χρησιμοποιώντας teflon. Το αποτέλεσμα ξεπέρασε τις προσδοκίες μας, και ο σκελετός του ρομπότ είναι τώρα εξαιρετικά σταθερός.
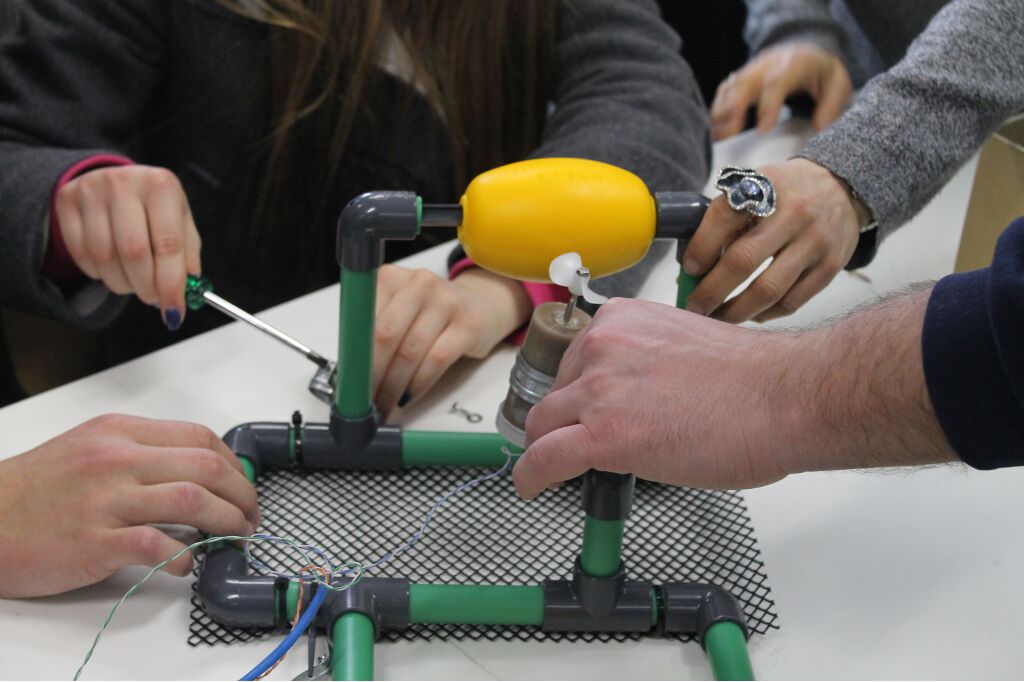
Οι κινητήρες δοκιμάστηκαν τροφοδοτούμενοι από μια ισχυρή μπαταρία, και επιβεβαιώσαμε ότι λειτουργούν κανονικά. Κατόπιν τοποθετήθηκαν στις θέσεις τους πάνω στο σκελετό. Χρειάστηκε να αναζητήσουμε μεγαλύτερες βίδες για να τους στερεώσουμε, καθώς αυτές που παρέχονταν δεν είχαν το απαιτούμενο μέγεθος.
Προετοιμάσαμε τα καλώδια του χειριστηρίου, γυμνώνοντας τις άκρες τους. Σημειώσαμε πάνω στο χειριστήριο τις θέσεις που θα γίνουν οι τρύπες για τους διακόπτες, τις ασφάλειες και τα καλώδια.
Έγινε νέα δοκιμή στο νερό, ξεκινώντας μόνο τον κινητήρα ανόδου-καθόδου (λόγω περιορισμένου χώρου!), ο οποίος λειτούργησε κανονικά.