
υπό ανάπτυξη

Σχετικά με αυτό το έργο
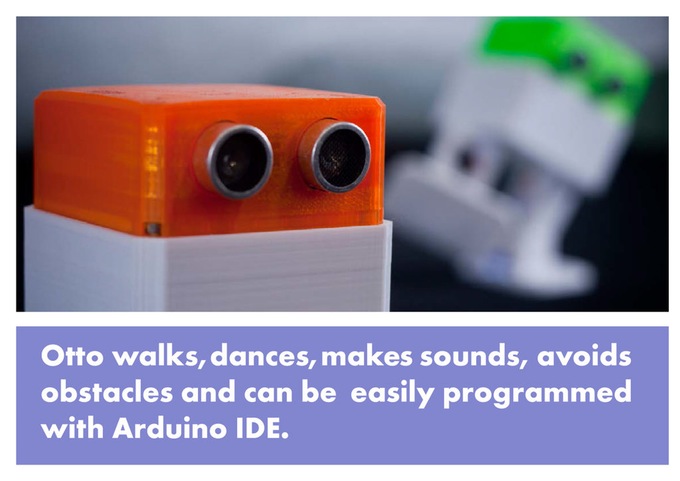
Ένα διαδραστικό ρομπότ που ο καθένας μπορεί να κάνει!
Τι μπορεί να κάνει ο Otto;
Otto βόλτες, χορεύει, κάνει τους ήχους και αποφεύγει τα εμπόδια.
Γιατί είναι o Otto ιδιαίτερο ρομπότ;
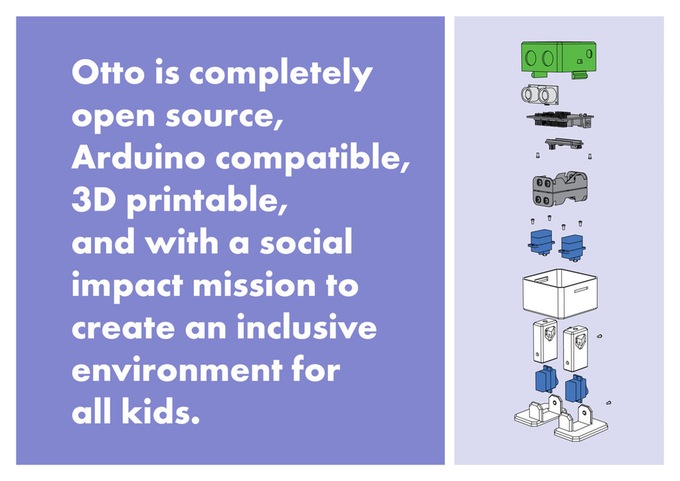
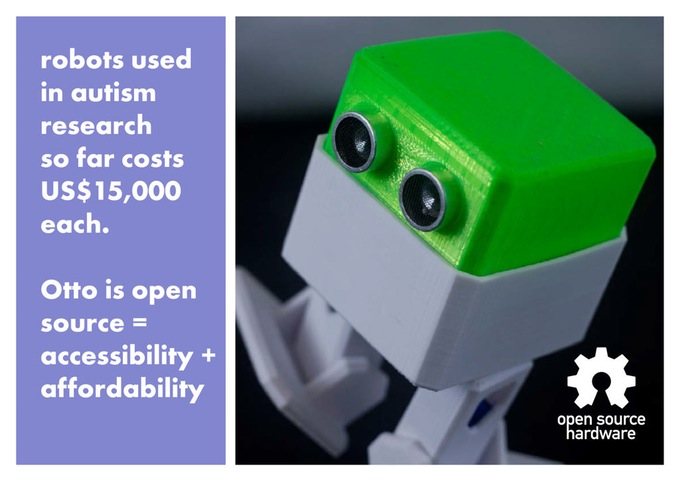
Otto είναι εντελώς ανοικτή πηγή στο λογισμικό και στο υλικό, είναι Arduino συμβατό, 3D εκτυπώσιμο, και με μια αποστολή κοινωνικού χαρακτήρα για τη δημιουργία ενός χωρίς αποκλεισμούς περιβάλλον για όλα τα παιδιά.
Otto ήταν εμπνευσμένο από ένα άλλο ρομπότ Instructable BoB the BiPed το δίποδο και προγραμματίζονται χρησιμοποιώντας τον κώδικα από άλλο ανοιχτού κώδικα ρομπότ που ονομάζεται Zowi.
CC-BY-SA
Οι διαφορές του Otto είναι συναρμολογημένoς σε μέγεθος (11 εκατοστά x 7 εκατοστών x12cm), με ενσωμάτωση όλων των στοιχείων και των εκφράσεων. Κάνοντας χρήση από το ράφι και των 3D εκτυπωμένων εξαρτημάτων, με απλές ηλεκτρονικές συνδέσεις (σχεδόν δεν απαιτείται συγκόλληση), και βασικές δεξιότητες κωδικοποίησης, θα είστε σε θέση να δημιουργήσετε το δικό σας χαριτωμένο φίλο Otto σε μόλις δύο ώρες!
Otto είναι μια σχεδίαση με τη χρήση λογισμικού Autodesk 123D Design που μπορείτε να το τροποποιήσετε για την προσαρμογή του στα δικά σας έργα ή την περαιτέρω βελτίωση του!
Ακολουθεί οδηγός βήμα προς βήμα στο πώς να χτίσει την DIY έκδοση του Otto - ναι, περισσότερο Ottos έρχονται και μπορείτε να μείνετε συντονισμένοι για ενημερώσεις από την εγγραφή στο ottobot.org
Βήμα 1: Πρώτα συγκεντρώστε υλικά και εργαλεία

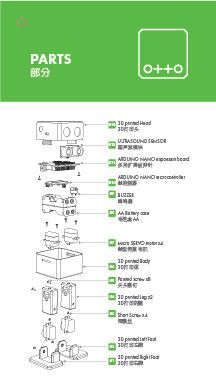
Συγκεντρώστε όλα τα εξαρτήματα από το ράφι που θα χρειαστείτε για αυτή την κατασκευή. Εδώ είναι η λίστα:
1. Arduino or Genuino Nano V3.0 ATmega328
2. Arduino NANO Shield I/O Extension Board Expansion XD-212
3. Mini usb cable. (most Arduino dealers provide the cable)
5. Mini servo SG90 9g x4 (each one should come with 2 pointed screws and one small screw).
6. 5V Buzzer.
7. Female to Female breadboard connectors cable 10cmx6.
9. 1.5V AA batteries x4.
10. Mini cross screwdriver. important magnetized
And then you only need to 3D print 6 parts in total:
11. 3D printed head.
12. 3D printed body.
13. 3D printed leg x2.
14. 3D printed right foot.
15. 3D printed left foot.
Βήμα 2: 3D ρυθμίσεις εκτύπωσης
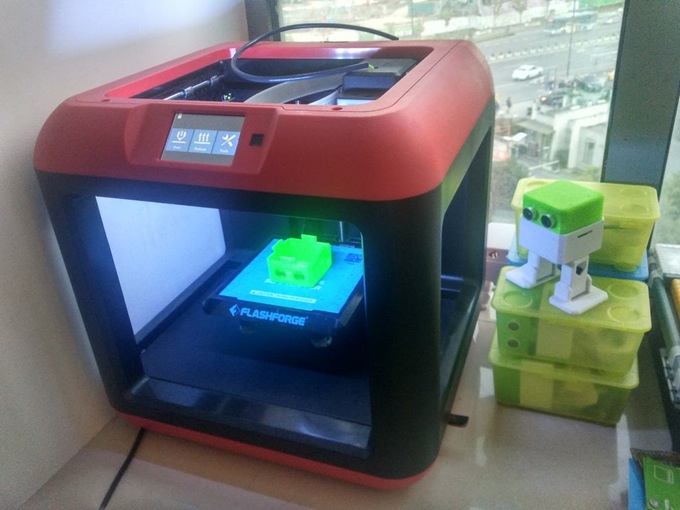
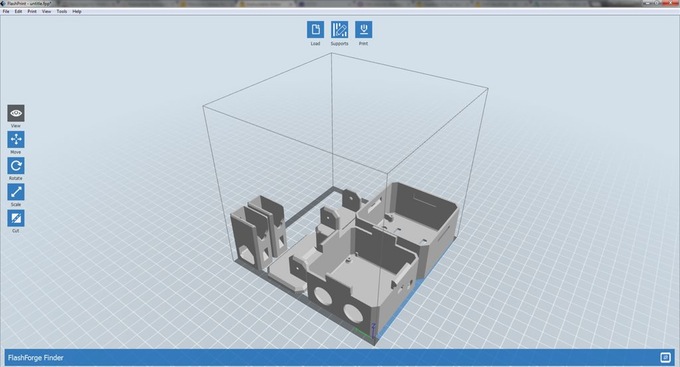
Otto είναι πολύ καλά σχεδιασμένος για 3D εκτύπωση, τα αρχεία που είχατε κατεβάσει με ακίνητο προσανατολισμό και επικέντρωσει, οπότε δεν θα σας κάνει κόπο αν ακολουθήσετε αυτές τις κοινές παραμέτρους:
Συνιστάται να χρησιμοποιείτε έναν εκτυπωτή FDM 3D με υλικό PLA.
Δεν χρειάζεται υποστήριξη ή σχεδίες καθόλου.
Ανάλυση: 0,15 χιλιοστά
Συμπληρώστε την πυκνότητα στα 20%
Μπορείτε να εκτυπώσετε ξεχωριστά κομμάτι κομμάτι για να ταιριάζει με τα χρώματα του αρχικού σχεδιασμού αλλάζοντας το χρώμα του PLA ή προαιρετικά εκτυπώσετε όλα την ίδια στιγμή σε μια έκταση 14 εκατοστά x 14 εκατοστά.
Κατεβάστε συνολικά όλα τα κομμάτια μέσα σε ένα STL αρχείο
ή πηγαίνουμε στο γνωστό site thingiverse για να τα κατεβάσουμε ένα ένα
http://www.thingiverse.com/thing
Βήμα 3: Αναδιοργάνωση και ελέγξτε τα μέρη σας από κάτω προς τα πάνω.
Όπως αναφέρεται στο βήμα 2, Micro κινητήρες σέρβο έρχονται με 3 βίδες που περιλαμβάνονται πλέον στην εικόνα και ανακατατάξεις στον αριθμό τμημάτων για πιο εύκολη ανάγνωση.
Μην ξεχνάτε να έχετε έτοιμο το μαγνητισμένο σας μίνι κατσαβίδι.
Εκτυπώστε το συνημμένο εγχειρίδιο οδηγιών για λόγους ευκολίας.
Βήμα 4: Συναρμολόγηση servos ποδιών
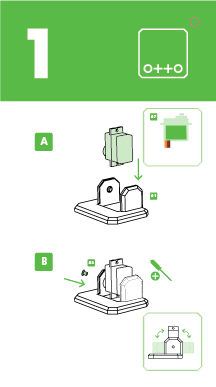

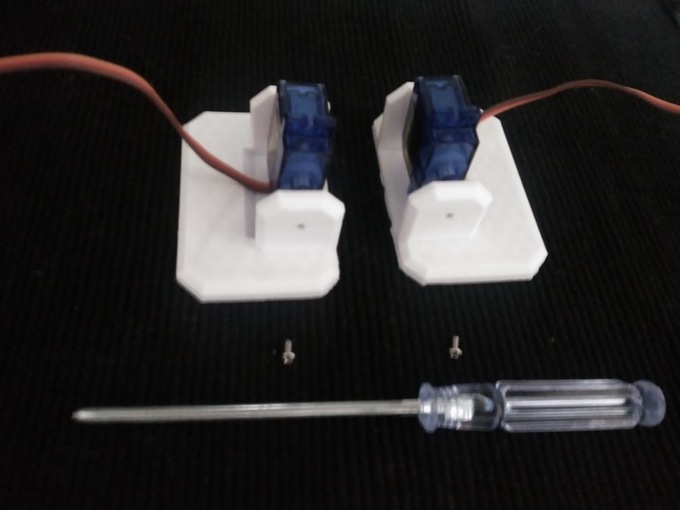
Βάλτε το μικρο σερβο μοτέρ μέσα τα πόδια και στη συνέχεια σπρώξτε το μέσα, αν είναι λίγο σκληρό ίσως χρειαστεί να καθαρίσετε περισσότερο την περιοχή με ένα κόφτη.
Είναι πολύ σημαντικό να ελέγχουμε ότι το σέρβο μπορεί να περιστρέφεται κατά τουλάχιστον 90 μοίρες προς κάθε πλευρά.
Μετά τον έλεγχο της κίνησης χρησιμοποιούμε μόνο τη μικρή βίδα για να το φτιάξεται.
Ίδια διαδικασία και για το άλλο πόδι.
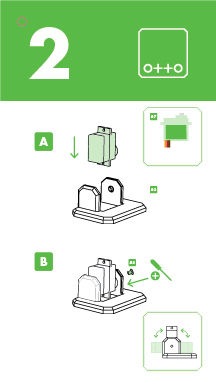
Βήμα 5: Τοποθέτηση τα Σέρβο του σώματος.
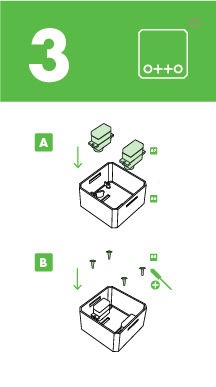
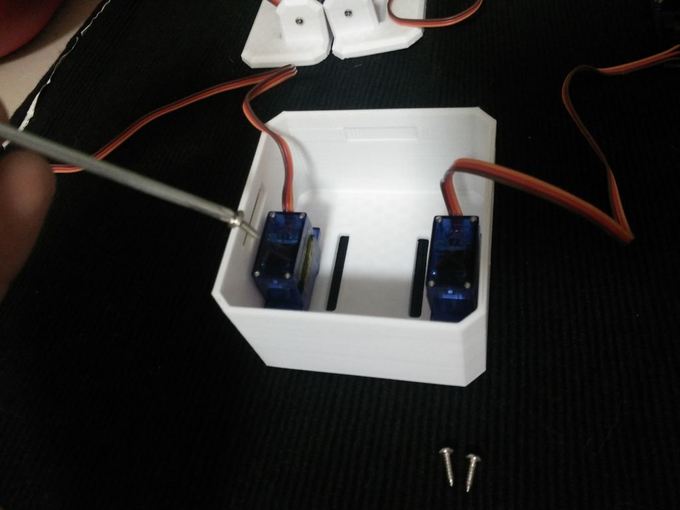
Πάρτε τα άλλα 2 servos και βάλτετα στις καθορισμένες θέσεις στο 3D τυπωμένο το σώμα και να τα στηρίξετε μόνο με τις μυτερές βίδες.
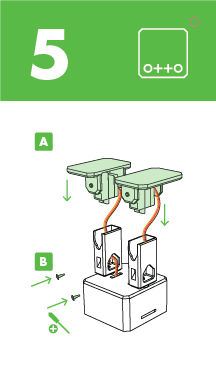
Βήμα 6: Στερεώστε τα πόδια στο σώμα
Συνδέστε τα πόδια στο κέντρο τoυ μικρο σέρβο κινιτήρα, σημαντικό είναι ότι θα πρέπει να ελέγξετε τα πόδια να είναι σε θέση να περιστρέφονται κατά 90 μοίρες σε κάθε πλευρά σε σχέση με το σώμα.
Μετά την επαλήθευση της ευθυγράμμισης στερεώστε τους χρησιμοποιώντας τις μικρές βίδες στην τρύπα στο εσωτερικό του ποδιού.
Βήμα 7: Τοποθέτηση των πατουσών στα πόδια

Φροντίστε τα καλώδια, όπως φαίνεται στην εικόνα όπου θα πρέπει να βάλετε τα καλώδια μέσα από τις σχισμές του σώματος διαμέσου της τρύπας των ποδιών.
Από τη στιγμή που είναι σε σωστή θέση χρησιμοποιείστε τις προβλεπόμενες βίδες για να τα στερεώσετε από το πίσω μέρος.
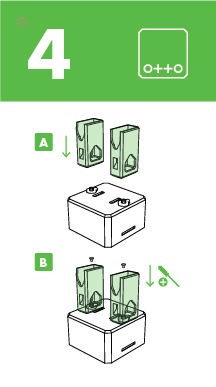
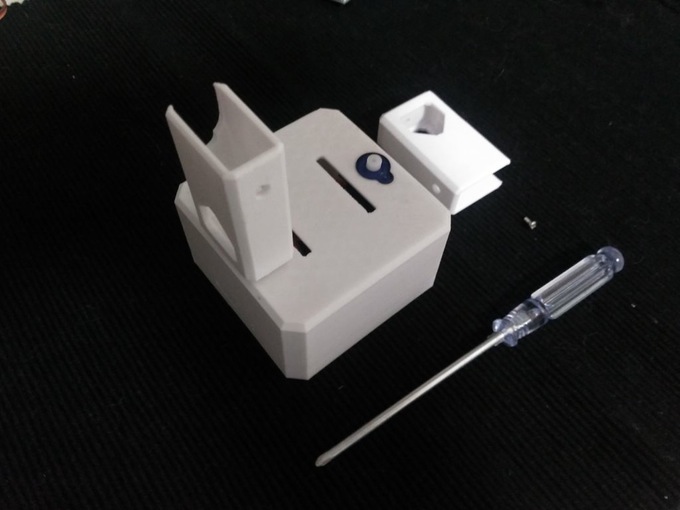
Βήμα 8: Συναρμολόγηση κεφαλής
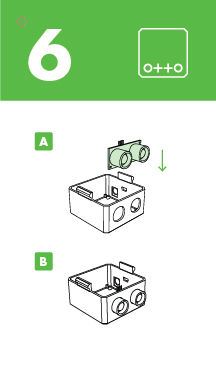
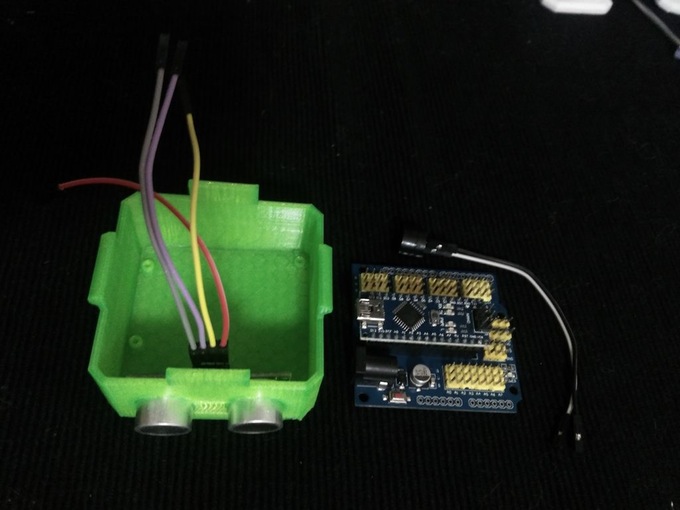

Ξεκινήστε από τον αισθητήρα υπερήχων είναι σημαντικό να βγούν τα μάτια στο όριο.
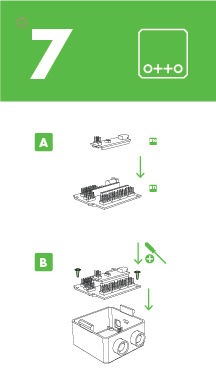
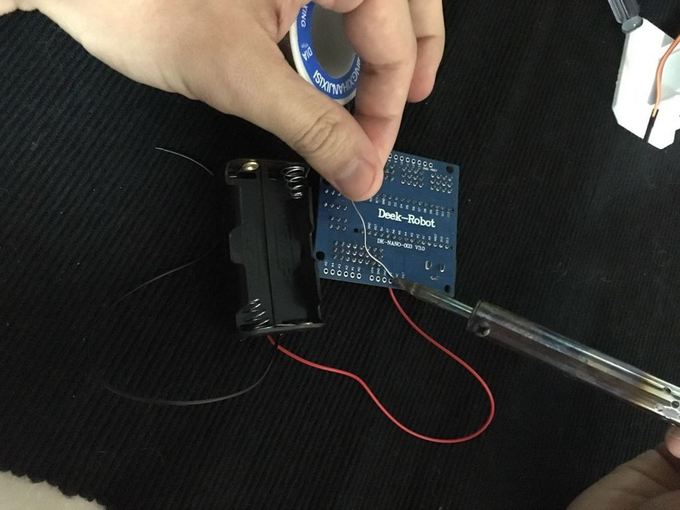
Μετά την τοποθέτηση του νανο Arduino στην ασπίδα (πλακέτα επέκτασης), προαιρετικά μπορείτε να συνδέσουν ή κολλήσετε το θετικό καλώδιο της θήκης της μπαταρίας στο Vin στην πλακέτα και τη γείωση σε οποιοδήποτε GND πιν.
Τοποθετήστε διαγώνια και τις δύο πλακέτες μαζί έτσι ώστε να έρθει πρόσωπο ο conector USB στην τρύπα στο 3D τυπωμένο κεφάλι, στη συνέχεια, χρησιμοποιήστε τις 2 τελευταίες βίδες για να το στεραιώσετε.
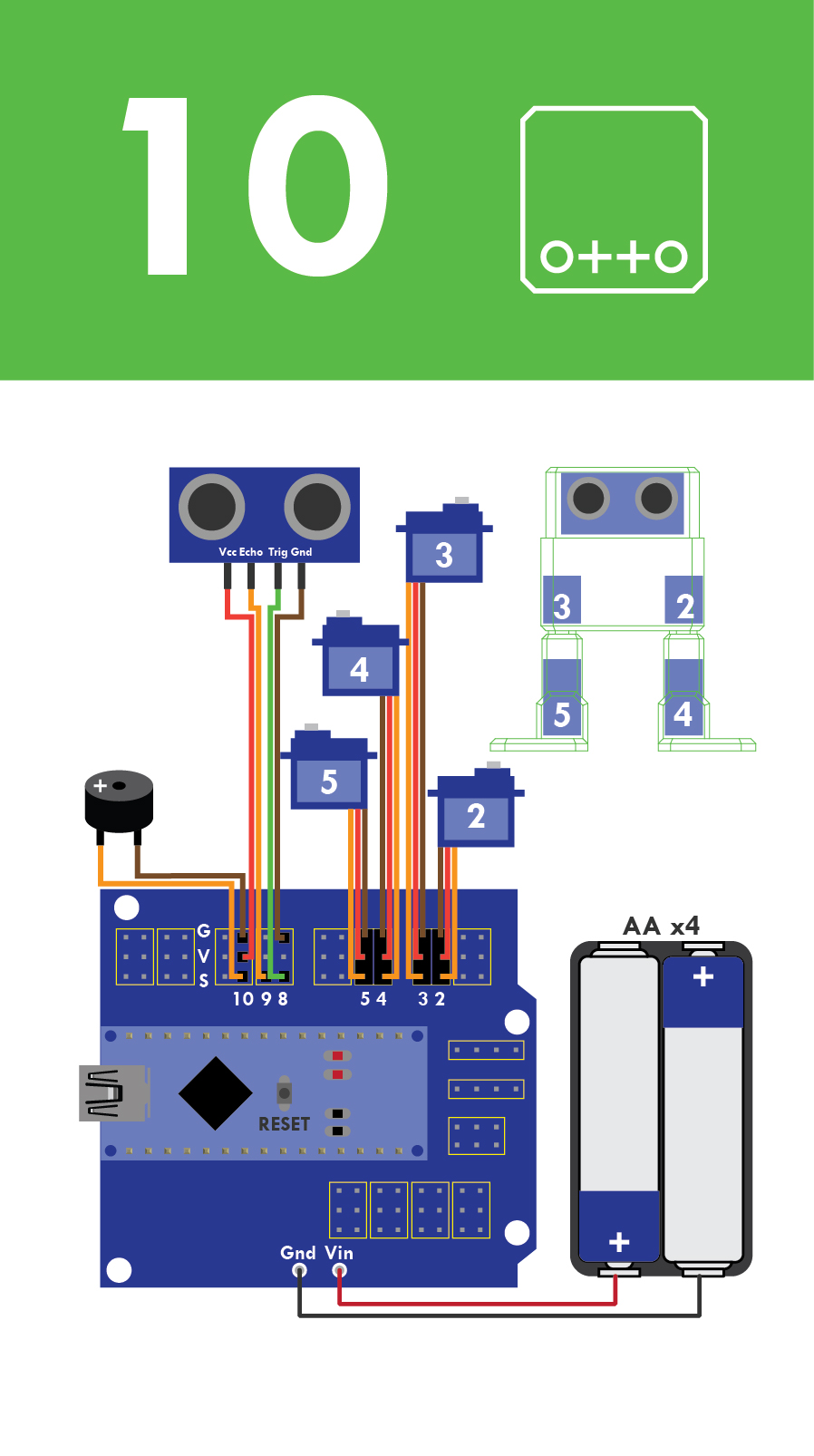
Βήμα 9: Ηλεκτρική σύνδεση
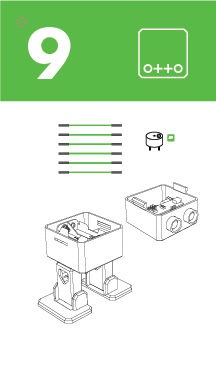
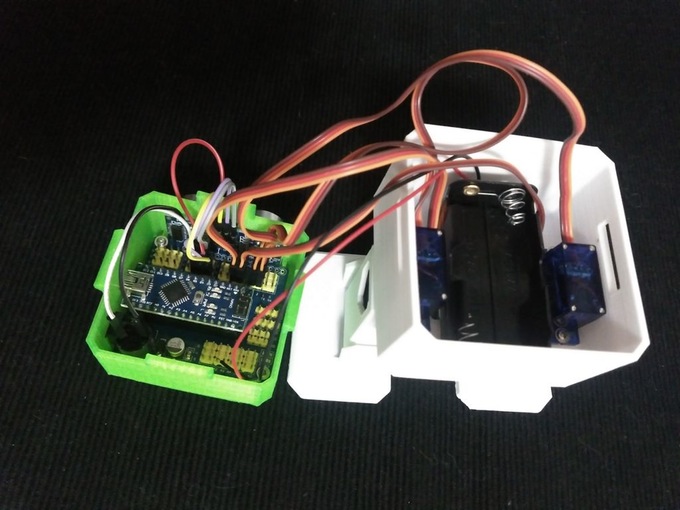
Προετοιμάστε τα καλώδια breadboard και τον βομβητή.
Στη συνέχεια, ακολουθήστε τους αριθμούς των ακροδεκτών όπως το διάγραμμα και φροντίστε να τα βάλετε στη σωστή θέση.
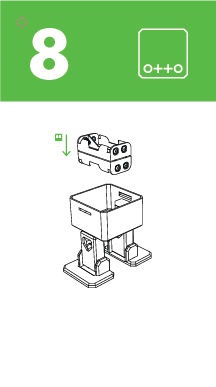
Βήμα 10: Κουμπώστε το κεφάλι και να ανεβάσετε τον κώδικα
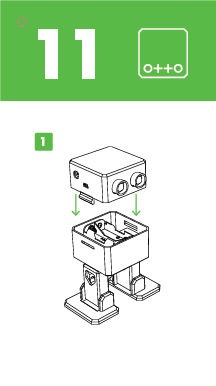
To κεφάλι έχει 4 κουμπώματα, να φροντίσετε για τα καλώδια και ασφαλίστε το.
Για τον προγραμματισμό θα πρέπει να:
- Download & install Arduino software.https://www.arduino.cc/en/Main/Software
- Αντιγράψτε τις βιβλιοθήκες του Oscillator στον φάκελο C:\Users\user\Documents\Arduino\libraries\Oscilator εφόσον κατεβάσετε όλο το συμπιεσμένο αρχείο και μέσα από το sketch του Arduino κάντε εγκατάσταση την βιβλιοθήκη που βρίσκεται στο φάκελο Oscilator
- Συνδέστε τον Otto σας διαμμέσου USB
- Τελικά φορτώστε το αρχείο ΟTTO_smooth_criminal.ino με το κώδικα στον Arduino Nano και ο Otto είναι έτοιμος να χορέψει!
-
Μπορείς συχνά να χρησιμοποιείς διαφορετικό κώδικα από τον ίδιο Github repository.
Μείνετε συντονισμένοι γιατί έρχονται περισσότερες δυνατότητες χρησιμοποιώντας Bluetooth, και περισσότερους αισθητήρες και αλληλεπιδράσεις. http://otto.strikingly.com/
Όλα τα αρχεία κώδικας σχέδια βιβλιοθήκες υπάρχουν στο γνωστό χώρο του Github