Για να ελέγξουμε τα 2 μοτέρ του ρομποτικού οχήματος θα χρειαστούμε ένα ολοκληρωμένο κύκλωμα με τα παρακάτω χαρακτηριστικά:
? H-Bridge : L293D chip το οποίο παρέχει 0.6A σε κάθε γέφυρα (1.2A μέγιστο) με θερμική προστασία. Μπορεί να διαχειριστεί μοτέρ από 4.5VDC έως 25VDC.

Στην επόμενη εικόνα βλέπουμε τους ακροδέκτες του ολοκληρωμένου:
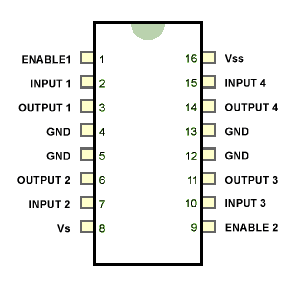
Τα INPUT 1 – INPUT 4 δέχονται τα σήματα ελέγχου από τον μικροελεγκτή, ενώ τα OUTPUT1&2 τροφοδοτούν τον 1ο κινητήρα και τα OUTPUT3&4 τροφοδοτούν τον 2ο κινητήρα . Τα ENABLE πρέπει να είναι σε λογικό 1 για να ενεργοποιηθούν οι έξοδοι OUTPUT.
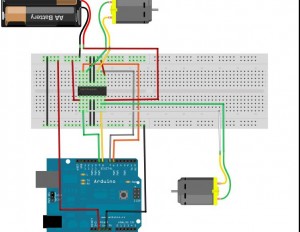
Μια τυπική συνδεσμολογία για δύο κινητήρες φαίνεται στο σχήμα:
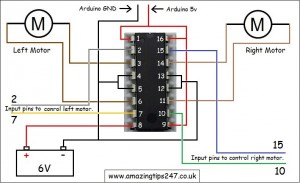
Στον ακροδέκτη 8 συνδέεται η εξωτερική τροφοδοσία Vs (7-25V)των κινητήρων, ξεχωριστή από αυτή του μικροελεγκτή Vss (5V), ενώ η γείωση GND είναι κοινή με αυτή του μικροελεγκτή.
Για την οδήγηση και τον έλεγχο της φοράς περιστροφής συμβουλευτείτε τον παρακάτω πίνακα:
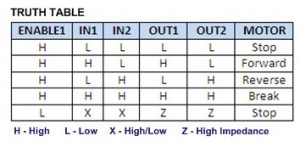
Τέλος υπάρχει η δυνατότητα να κάνετε έλεγχο ταχύτητας των κινητών οδηγώντας τα INPUTs από τις εξόδους PWM του μικροελεγκτή (στέλνοντας μια τιμή μεταξύ 0 και 255).