Όταν επινοήθηκε ο όρος “μηχατρονική”, οι περισσότεροι άνθρωποι δεν είχαν ιδέα, σε τι ακριβώς αναφέρεται. Η μηχατρονική έχει συνδεθεί με πλείστα διαφορετικά αντικείμενα, συμπεριλαμβανομένων των εγκαταστάσεων παραγωγής, του ελέγχου κίνησης, της ρομποτικής, του ευφυούς ελέγχου, των ολοκληρωμένων συστημάτων, των ελεγκτών δονήσεων και θορύβου, των αυτοκινούμενων συστημάτων, της μοντελοποίησης και του σχεδιασμού, των αισθητήρων, καθώς επίσης και των μικροσυσκευών, όπως λ.χ. τα ηλεκτρομηχανικά συστήματα.
Ο όρος “Μηχατρονική" αναφέρεται στον συνδυασμό των επιστημών της Μηχανολογίας, της Ηλεκτρονικής - Ηλεκτρολογίας και της Πληροφορικής (Μηχατρονική = Μηχανολογία + Ηλεκτρονική + Πληροφορική). Θεωρείται ο εμπλουτισμός των κατά βάση μηχανολογικών συστημάτων με ηλεκτρονικά εξαρτήματα, που αρκετά συχνά εμπεριέχουν λογισμικό.
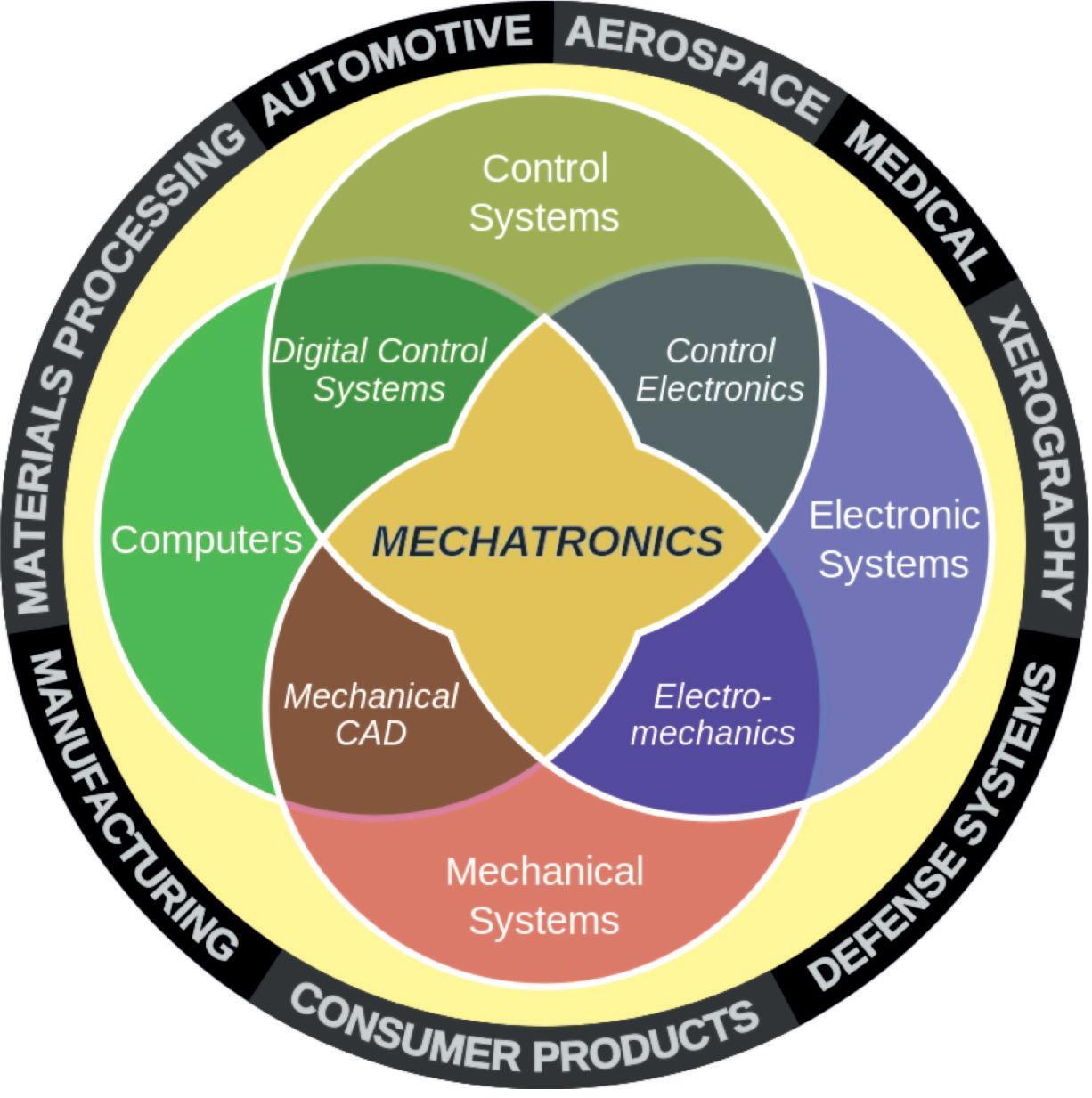
Αναλυτικότερα, η μηχατρονική αποτελείται από:
- Συστήματα ελέγχου
- Ηλεκτρονικά συστήματα
- Μηχανολογικά συστήματα
- Υπολογιστές
Οι εφαρμογές της μηχατρονικής αφορούν την αεροναυπηγική, τη βιομηχανία αυτοκινήτων, την κατασκευή υλικών κ.ά., όπως φαίνεται και στον εξωτερικό κύκλο της παρακάτω εικόνας.
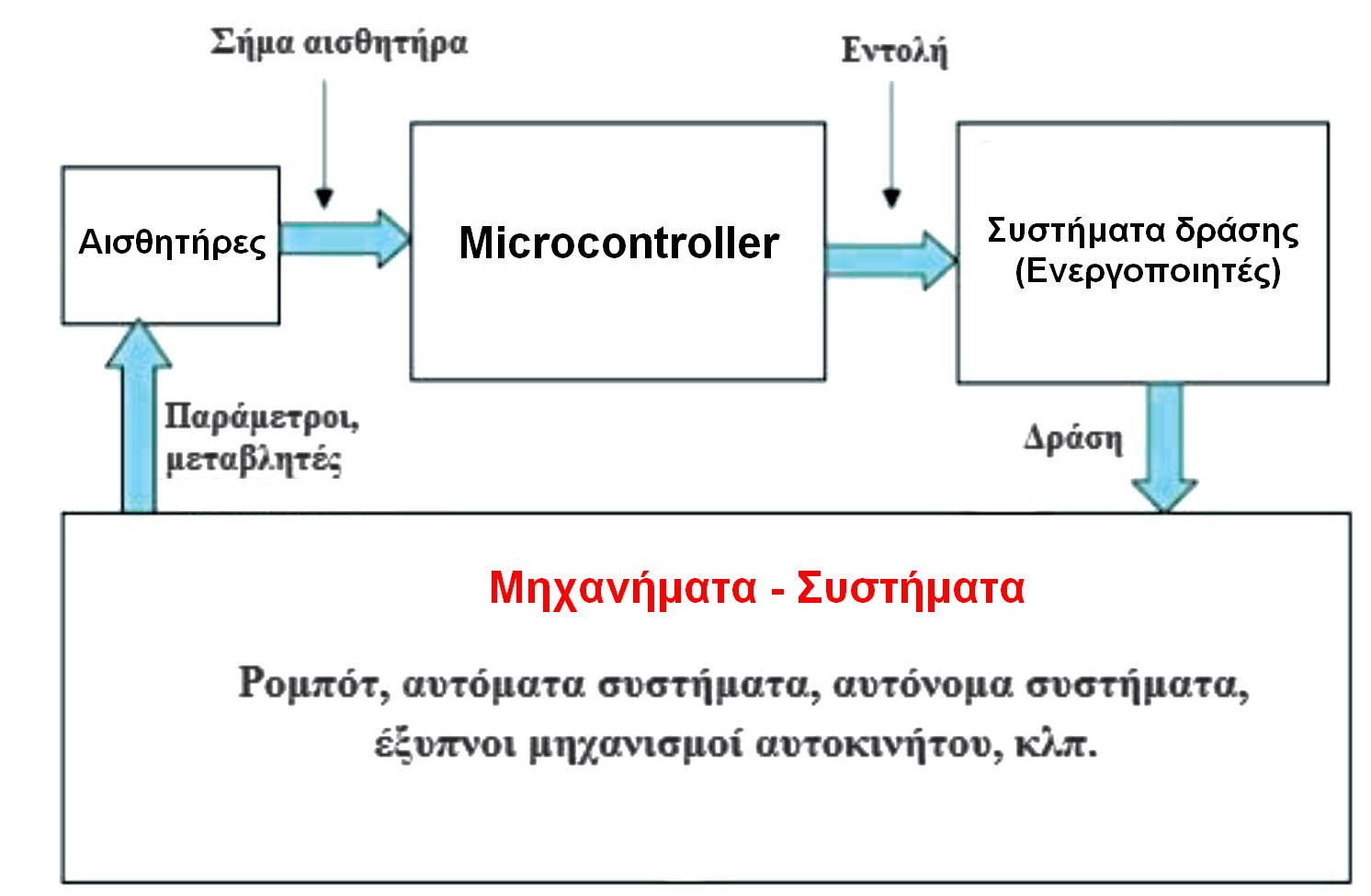
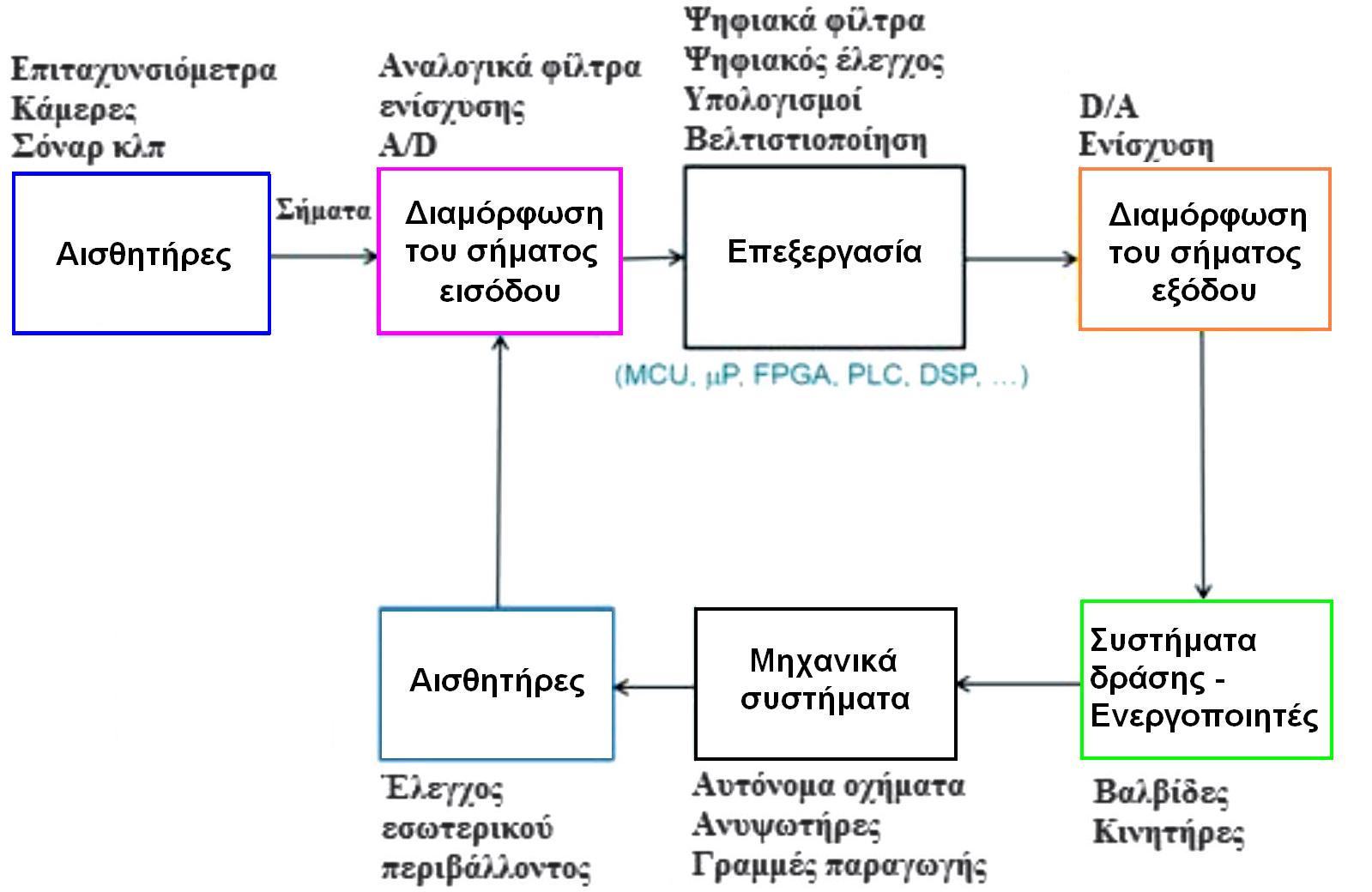
Για να περιγραφεί η αλληλεπίδραση μεταξύ των επιστημονικών πεδίων, ο πιο αποδεκτός όρος θεωρείται ο όρος "μηχατρονική", ακριβώς επειδή αναφέρεται σε ένα δυναμικό σύστημα ολοκληρωμένης συνεργασίας της μηχανολογίας με την ηλεκτρονική, μέσω του ευφυούς ελέγχου των υπολογιστών, αλλά και κύρια εφαρμογή στον σχεδιασμό και την κατασκευή βιομηχανικών προϊόντων ή διαδικασιών. Διότι για την επίτευξη αυτής της συνεργασίας, απαιτούνται λογισμικό, αισθητήρες, ελεγκτές, συστήματα δράσης κλπ.
Ο όρος "μηχατρονική" επινοήθηκε από τον Tetsuro Mori, ανώτερο μηχανικό της ιαπωνικής εταιρείας Yaskawa, το 1969. Κατά τη διάρκεια της δεκαετίας του 1970, η μηχατρονική βρήκε εφαρμογή στην σερβοτεχνολογία, στην οποία απλές βοηθητικές τεχνολογικές εφαρμογές σχετίζονται με μεθόδους ελέγχου, π.χ. στις αυτόματες πόρτες και στην αυτόματη εστίαση φακών φωτογραφικών μηχανών. Εν συνεχεία, κατά τη δεκαετία του 1980, η μηχατρονική χρησιμοποιήθηκε στην τεχνολογία των πληροφορικών συστημάτων, με τη βοήθεια της οποίας ενσωματώθηκαν μικροεπεξεργαστές σε μηχανικά συστήματα για τη βελτίωση των επιδόσεών τους. Τέλος, τη δεκαετία του 1990, η μηχατρονική εστίασε στην τεχνολογία των επικοινωνιών, προκειμένου να συνδυάσει και να ενοποιήσει προϊόντα σε μεγάλα δίκτυα, συμπεριλαμβανομένης της παραγωγής των ευφυών συστημάτων, των τεχνολογιών και των λοιπών παραγώγων.