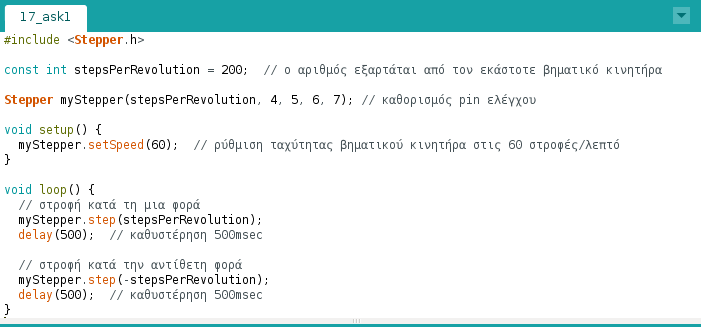
Βηματικός κινητήρας

Ένας βηματικός κινητήρας είναι ένας κινητήρας που μετατρέπει την ηλεκτρική ενέργεια σε μηχανική ισχύ. Η διαφορά του σε σχέση με τους άλλους κινητήρες είναι ότι δεν περιστρέφεται συνεχώς, αλλά με βήματα (κλάσματα ενός πλήρους κύκλου) των οποίων το μέγεθος εξαρτάται κυρίως από τα μηχανικά μέρη του κινητήρα και από τη μέθοδο οδήγησης. Επίσης διαφέρει η τροφοδοσία του, καθώς οδηγείται με παλμούς αντί για τάση AC ή DC.

Αυτή η μέθοδος χρησιμοποιείται σπάνια (κυρίως όταν απαιτείται εξοικονόμηση ενέργειας), καθώς παρέχει λιγότερο από το ήμισυ της ονομαστικής ροπής του κινητήρα, με αποτέλεσμα να πρέπει να είναι χαμηλό το φορτίο του κινητήρα.
Πιο συχνά χρησιμοποιούμενη μέθοδος είναι η οδήγηση πλήρους βήματος (full-step drive), όπου τα πηνία ενεργοποιούνται σε ζεύγη (σε σειρά ή παράλληλα). Σε αυτή την περίπτωση ο βηματικός κινητήρας απαιτεί διπλάσια τάση ή διπλάσιο ρεύμα, αλλά παράγει κατά 100% την ονομαστική ροπή του κινητήρα. Αυτή η μέθοδος οδήγησης φαίνεται στο παρακάτω animation.
Με την οδήγηση μισού βήματος (half-stepping) επιτυγχάνουμε διπλάσια ακρίβεια στην κίνηση του κινητήρα, κάνοντάς τον να κινείται σε μισά βήματα από ότι στο full-step drive, χωρίς να αλλάξουμε τίποτα από το υλικό του! Εφόσον ο ίδιος κινητήρας κάνει τα διπλάσια βήματα ανά στροφή, πετυχαίνουμε διπλασιασμό στην ακρίβεια του συστήματος θέσης, όπως φαίνεται και στο παρακάτω animation.

Τέλος, υπάρχει και η μέθοδος οδήγησης microstepping όπου στα πηνία στέλνονται κυματομορφές παρόμοιες με την ημιτονοειδή κυματομορφή, αντί για παλμούς. Με αυτό τον τρόπο επιτυγχάνουμε ομαλότερη και ακριβέστερη κίνηση του κινητήρα, ο οποίος μπορεί να περιστρέφεται συνεχώς, ακριβώς όπως ο κινητήρας DC.